
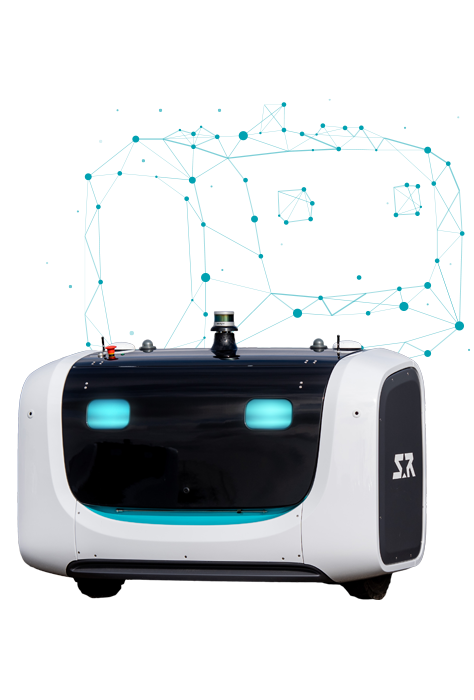
Self Picking, Moving and Dropping Vehicles
10km/h Speed
Autonomous Obstacle Detection and Stops
Trajectory Tracking
Dynamic Trajectory Allocation
Human-Robot Handover Strategy
Site Performance Real-Time Tracking
Speed, cars moved, charging time
Modular Code Architecture with ROS
Robotic Operating System (middleware)
Autodiagnostic Software & Hardware
Teleoperation via HMI
Human machine interface
Centimeter Localization SLAM & dGPS
Simultaneous Localisation And Mapping + differential GPS
Intelligent & Autonomous Charging System
Safety Equipement
Automaton, communication...